Caméras sur bras robotiques
La caméra Stereo Visard pour un traitement d’image précis et intelligent dans des environnements dynamiques
Les caméras permettent aux robots de percevoir leur environnement, de reconnaître des objets et d’effectuer des tâches complexes. Pour effectuer ces tâches, les caméras des bras robotiques doivent être capables de compenser les vibrations, de traiter les données d’image en temps réel et d’offrir une intégration transparente. Cela nécessite des caméras spéciales conçues pour surmonter ces défis.
Applications typiques des caméras montées sur des bras de robot
Grâce à sa résistance aux vibrations et à sa conception compacte, la caméra Stereo visard est idéale pour une utilisation industrielle sur des bras de robots et dans des environnements dynamiques.
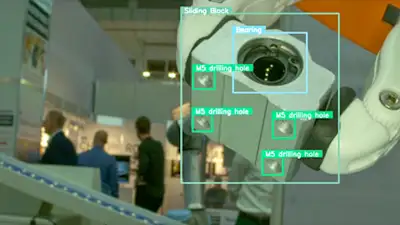

L’assemblage sur bras de caméras industrielles permet d’obtenir des cellules robotisées compactes et flexibles. Avec le bras robotisé, la position de prise de vue de la caméra peut être librement modifiée. Cela permet de voir les objets avec précision dans différentes directions et à courte distance.

Nos caméras stéréo 3D de qualité industrielle pour les applications robotiques
La caméra pour les meilleurs résultats sur un bras de robot
Bien qu’il y ait d’énormes avantages à avoir une caméra sur un bras robotique, certains défis doivent être pris en compte. La caméra Stereo Visard a été spécialement développée pour répondre à ces exigences.

Défie les vibrations, les chocs et les éclaboussures
Les bras robotiques génèrent des vibrations qui peuvent conduire à des images floues. Notre caméra Stereo Visard convainc par sa stabilité mécanique suffisante pour éviter ces problèmes, et prend également en compte les conditions difficiles rencontrées dans les environnements de production :
Résistant aux vibrations jusqu’à 5 g et chocs jusqu’à 50 g
Le connecteurM12 assure la sécurité des connexions par câble
Résistant aux éclaboussures, grâce à l'indice de protection IP54
Capacité en temps réel pour des résultats fiables
Pour de nombreuses applications, en particulier avec des mouvements rapides du bras robotique, il est crucial que le traitement de l’image ait lieu en temps réel.
La caméra Stereo visard offre desdonnées en temps réel par Traitement embarqué : Les données d’image sont traitées directement sur la caméra et le système peut réagir rapidement. Un ordinateur externe n’est pas nécessaire.

Prévention des collisions grâce au contrôle des collisions
Les bras robotiques doivent souvent se contenter d’un espace limité et effectuer des mouvements rapides en succession rapprochée. Cela peut facilement entraîner des collisions et, dans le pire des cas, la caméra peut être décalibrée. Grâce à Collision Check, la Stereovisard fonctionne de manière fiable, même dans les petits espaces.
La fonctionCollision Check des modules logiciels 3D ItemPick, 3D BoxPick ou 3D SilhouetteMatch empêche la pince d’entrer en collision avec d’autres objets.

Intégration facile dans l’application cible
L’intégration d’un système de caméra dans le contrôleur du robot est essentielle et un facteur crucial pour l’efficacité et la fiabilité des applications robotiques.
Avec son Interface Ethernet, la caméra stereo visardBasler assure une transmission stable et rapide des données et permet une intégration facile dans les systèmes existants.
Interfaces logicielles disponibles pour un large éventail de marques de robotique, telles que : ABB, FANUC, Franka Robotics et Fruitcore Robotics. Nous fournissons lesKUKA,Techman Robot, Universal Robotset Yaskawa Motoman Robotics pour le contrôle de la caméra.
L’intégration de systèmes de préhension spéciaux, tels que Préhenseur De SAINDOUX, sont également couverts par les interfaces logicielles.

Calibrage précis de la caméra et du bras du robot
Un Calibrage oeil-main est nécessaire lorsqu’un système robotique utilise une caméra pour détecter des objets, puis interagit avec eux à l’aide d’une pince ou d’un outil. Après tout, le système doit savoir comment traduire les coordonnées de la caméra'en coordonnées du robot'.
Simple: Le Calibrage oeil-main peut être effectué manuellement via une interface graphique Web ou de manière programmatique via l’interface API REST .

Léger et compact
Les bras robotiques ont des capacités limitées en termes de poids supplémentaire pouvant être supporté.
Lumière: Faible poids à partir de 0,68 kg
Compact: à partir de 135 mm x 75 mm x 96 mm
Grâce à ces caractéristiques du produit, la charge supplémentaire sur le robot est minimisée et il est plus facile d’intégrer l’imagerie.
Avantages de la caméra Stereo visard pour bras robotiques
La caméra Stereo Visard est la solution parfaite pour les applications où les robots doivent travailler avec un système de caméra à la pointe de la technologie. Il offre :
Traitement autonome des données& Capacité en temps réel :
Grâce au traitement embarqué, la caméra peut traiter les données d’image sans ressources informatiques externes pour interagir rapidement avec le bras du robot.
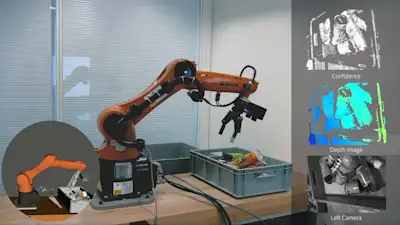
Capture 3D précise :
Idéal pour des applications telles que le prélèvement de bacs, il détecte les objets en 3D et calcule leur position exacte.
Conception robuste :
Bien adapté à un usage industriel et aux applications dynamiques, telles que les bras robotiques.
Une intégration simple :
Grâce à une connexion Ethernet et à des interfaces logicielles, la caméra peut être facilement intégrée dans des systèmes robotisés. L’étalonnage œil-main est assuré via l’interface API REST et garantit une adaptation facile au système de robot respectif.
Logiciel d'application Basler pour la robotique

Les différents modules logiciels sont conçus pour les applications robotiques typiques telles que la reconnaissance d’objets, les tâches de prélèvement et la navigation. Ils peuvent être activés pour l’application respective via plug-and-play et utilisés de manière intuitive, ce qui permet de réduire les coûts globaux de votre système.
Application Software for Robotics