Basler ToFソフトウェア
Basler Time-of-Flight(ToF)のセットアップと接続に必要な各種ツールを含むpylon追加パッケージとして、pylon上で3D画像処理をスムーズに行うことができます。

pylon追加パッケージの内容
Basler blazeビューワー
Basler GenTL Producer
サンプルプログラム
GenICam(GenTL、GenAPI)規格準拠(HALCON、Isaac、MIL、OpenCV、Point Cloud Library(PCL)、ROSなどの各種ライブラリーにプラグアンドプレイで接続可能)
Windows、Linux x86(64ビット)、Linux ARM対応

Basler blazeビューワー
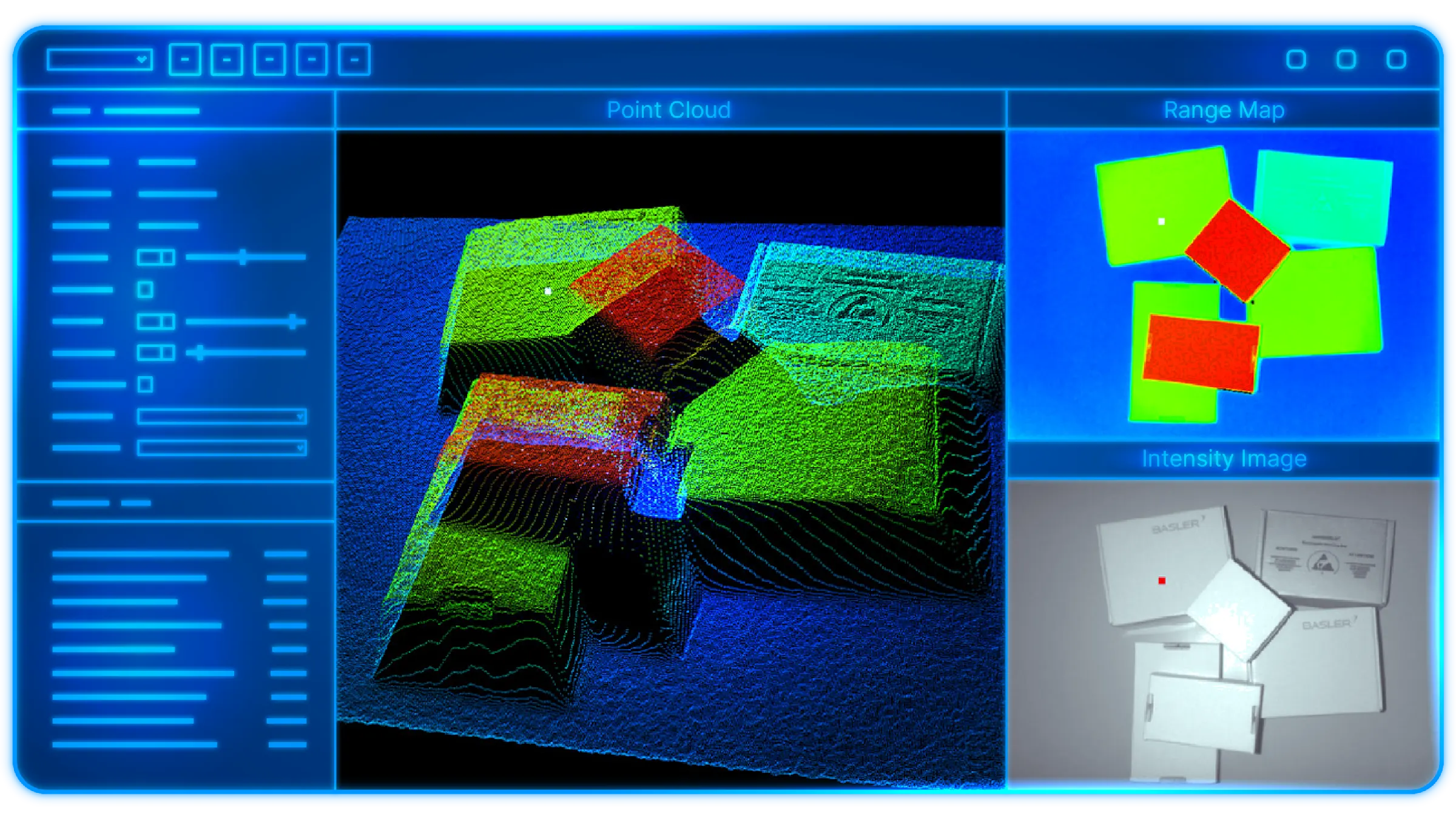
pylon追加パッケージに付属している使いやすい画像ビューワーです。奥行きデータや輝度画像の複数画面表示に対応しているほか、カメラの各パラメーターにも簡単にアクセスできます。
GenAPI機能ツリーを介して各種カメラ機能にアクセス
各パラメーターの説明を掲載
輝度画像、ポイントクラウド、レンジマップ、信頼性マップを表示
コードスニペットをソースコードに直接コピー&ペースト可能
画像の形式・設定を簡単保存
ロボットオペレーティングシステム(ROS)用pylonカメラドライバー
ROS 1、ROS 2対応のカメラドライバーです。pylonとBasler ToFカメラを接続し、低コストでリアルタイムな3D画像処理を行うことができるなど、3Dロボットビジョンの開発に最適です。

サンプルコード
pylon追加パッケージには豊富なサンプルコードも付属しており、カメラ機能やAPIに関する説明、使用例を参照しながら、Basler ToFカメラをスムーズにセットアップできます。
なお、サンプルコードはC++、C#、Pythonに対応しています。