カメラ搭載ロボットアーム
高精度かつスマートな画像処理により、さまざまな環境変化に対応するBasler Stereo visard
カメラによる周辺環境の把握と物体認識により、高度な作業を可能にするロボットビジョン。なかでも、カメラ搭載ロボットアームは、振動の制御、リアルタイムな画像処理、シームレスなセットアップが求められますが、これらの要件を満たすには特殊なカメラが必要になります。
カメラ搭載ロボットの主な用途
高い耐振動性とコンパクトなボディを特長とするStereo visardは、産業用ロボットアームへの取り付けや環境変化の激しい撮影用途に最適です。

ロボットに産業用カメラを取り付ければ、コンパクトかつ柔軟性の高いロボットビジョンシステムを簡単に構築できます。特にロボットアームの場合は、カメラの位置を自由に変えられるため、近距離・多方向から対象物を正確に捉えられます。

ロボット向け産業用ステレオカメラ
ロボットアーム向けカメラの要件
カメラ搭載ロボットアームには大きなメリットがある一方で、カメラの取り付けに際してさまざまな要件を満たさなければなりません。そこでおすすめなのが、ロボットアーム向けに特別開発されたStereo visardです。

耐振動・耐衝撃・耐水滴
ロボットアームに振動が加わると、画像ブレが発生するおそれがあります。Stereo visardは、機械的安定性が十分に確保されているだけでなく、生産現場の過酷な環境にも配慮した設計になっています。
優れた耐振動性(最大5g)・耐衝撃性(最大50g)
安定したケーブル接続を確保するM12コネクター
IP54クラスの耐水滴性
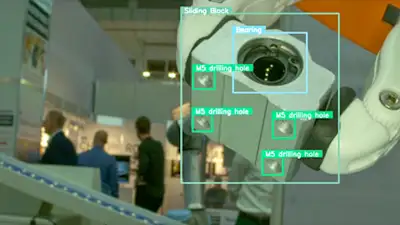
高精度かつリアルタイムな画像処理
幅広い用途に使用されているロボットアームですが、特に高速作業においては、リアルタイムな画像処理が欠かせません。
Stereo visardのオンボードによるリアルタイムなデータ処理:外部のコンピューターに頼ることなく、カメラ上で直接画像データを処理することで、システムの反応速度を向上

Collision Check機能による衝突回避
限られたスペースで素早い動きを繰り返すことが多いロボットアームは、周囲の物体に衝突するだけでなく、最悪の場合、キャリブレーションをやり直さなければならないおそれもあります。Stereo visardにはCollision Check機能が搭載されているため、狭い場所でも衝突することなく運用できます。
Collision Check機能:グリッパーと周囲の物体の衝突を回避(3D ItemPick、3D BoxPick、3D SilhouetteMatchの搭載機能)

各種ロボットに簡単に取り付け可能
ロボットを正確かつ効率的に運用するには、ビジョンシステムにロボットコントローラーを取り付ける必要があります。
イーサネットインターフェース搭載のStereo visardを活用し、高速かつ安定したデータ転送と既存システムへのスムーズな取り付けを実現
ABB社、ファナック社、Franka Robotics社、fruitcore robotics社、をはじめ、幅広いロボットメーカーのソフトウェアインターフェースによるカメラ制御が可能
ソフトウェアインターフェースを介してLARD Vacuum Gripperなどを使用した特殊なグリッピングシステムの構築にも対応


軽量&コンパクト
ロボットアームは積載能力が限られており、重い機器の搭載には適していません。
軽量:0.68kg~
コンパクト:135mm×75mm×96mm~
Stereo visardは軽量かつコンパクトであるため、ロボットアームにかかる荷重を最小限に抑えながら、スムーズに撮影を行うことができます。
Stereo visardの主な特長
ロボットアームと最先端のビジョンシステムを組み合わせたソリューションに最適なStereo visard。その主な特長は、以下の通りです。
自動かつリアルタイムなデータ処理
オンボード処理を行うことで、外部のCPUリソースに頼ることなく、ロボットアームを迅速に運用可能
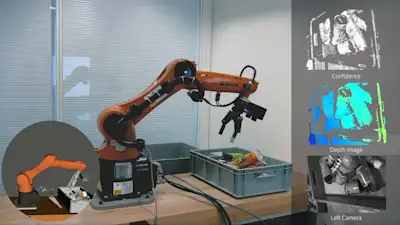
高精度な3D撮影
対象物の3D座標を取得し、正確な位置を算出することで、ビンピッキングなどの作業をサポート
丈夫な設計
産業用ロボットアームへの取り付けや環境変化の激しい撮影用途に最適
優れたセットアップ性
イーサーネット接続と各種ソフトウェアインターフェースを介して、ロボットアームにカメラを簡単に取り付け可能。REST APIによるハンド・アイ・キャリブレーションにも対応するなど、優れたセットアップ性を実現
Baslerロボット向けアプリケーションソフトウェア

プラグアンドプレイ接続と直感操作により、システム全体のコストを削減。物体認識、ピッキング、ナビゲーションなど幅広い用途のロボット制御に最適です。
アプリケーションソフトウェアの詳細はこちら