로봇 암 장착 카메라
역동적인 환경에서도 정밀하고 스마트한 이미지 처리를 위한 Stereo visard 카메라
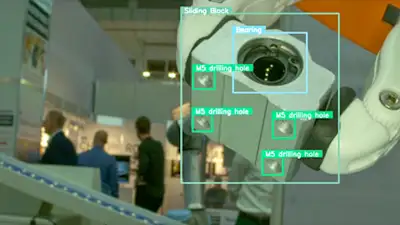
카메라는 로봇이 주변 환경을 인식하고, 객체를 식별하며, 복잡한 작업을 수행할 수 있도록 합니다. 이러한 작업을 원활하게 수행하려면, 로봇 암에 장착된 카메라가 진동을 보정하고, 이미지 데이터를 실시간으로 처리하며, 시스템과 매끄럽게 통합될 수 있어야 합니다. 이를 위해서는 이러한 과제를 해결할 수 있도록 설계된 전용 카메라가 필요합니다.
로봇 암 장착 카메라의 주요 활용 분야
진동 저항성과 컴팩트한 디자인을 갖춘 Stereo visard 카메라는 로봇 암 및 다이나믹한 산업 환경에서의 활용에 최적화되어 있습니다.

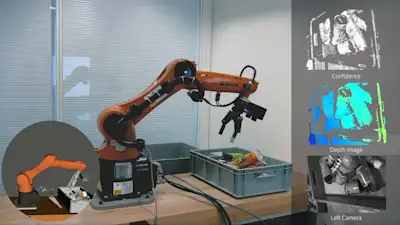
산업용 카메라를 로봇 암에 장착하면 컴팩트하고 유연한 로봇 셀 구성이 가능합니다. 로봇 암을 활용하여 카메라의 촬영 위치를 자유롭게 조정할 수 있어, 객체를 다양한 각도와 가까운 거리에서 정밀하게 관찰할 수 있습니다.

로봇 어플리케이션을 위한 산업용 3D 스테레오 카메라
로봇 암에서 최상의 결과를 제공하는 카메라
로봇 암에 카메라를 장착하면 많은 이점을 얻을 수 있지만, 고려해야 할 몇 가지 과제도 존재합니다. Stereo visard 카메라는 이러한 요구 사항을 충족하도록 특별히 개발되었습니다.

진동, 충격, 물 튀김에도 강한 내구성
로봇 암은 진동을 발생시켜 이미지가 흐려질 수 있습니다. Basler Stereo visard 카메라는 충분한 기계적 안정성을 갖춰 이러한 문제를 방지하며, 동시에 생산 환경의 거친 조건까지 고려하여 설계되었습니다.
최대 5g의 진동 및 50g의 충격에 대한 내진 설계
M12 커넥터로 안정적인 케이블 연결 보장
IP54 등급으로 방수 및 방진 보호
신뢰할 수 있는 결과를 위한 실시간 처리 기능
다양한 어플리케이션, 특히 로봇 암의 빠른 움직임이 수반되는 작업에서는 실시간 이미지 처리가 필수적입니다.
Stereo visard 카메라는 온보드 프로세싱 을 통한 실시간 데이터 처리를 제공합니다. 이미지 데이터가 카메라 내에서 직접 처리되므로, 시스템이 신속하게 반응할 수 있으며 별도의 외부 컴퓨터가 필요하지 않습니다.

Collision Check기능으로 충돌 방지 지원
로봇 암은 제한된 공간에서 연속적으로 빠른 움직임을 수행해야 하는 경우가 많습니다. 이러한 환경에서는 충돌이 발생하기 쉽고, 최악의 경우 카메라가 디칼리브레이션될 수도 있습니다. Collision Check 기능 덕분에 Stereo visard 카메라는 좁은 공간에서도 신뢰성 있게 작동합니다.
Collision Check 기능은 3D ItemPick, 3D BoxPick, 3D SilhouetteMatch 소프트웨어 모듈에서 그리퍼가 다른 객체와 충돌하는 것을 방지합니다.

로봇 애플리케이션에 손쉬운 통합
로봇 컨트롤러에 카메라 시스템을 통합하는 것은 필수적이며, 로봇 어플리케이션의 효율성과 신뢰성을 결정하는 중요한 요소입니다.
Basler Stereo visard 카메라는 Ethernet 인터페이스를 통해 안정적이고 빠른 데이터 전송을 보장하며, 기존 시스템에 쉽게 통합될 수 있습니다.
ABB, FANUC, Franka Robotics, Fruitcore Robotics 등 과 같은 다양한 로봇 브랜드에 호환되는 소프트웨어 인터페이스를 제공합니다. 또한, KUKA, Techman Robot, Universal Robots, Yaskawa Motoman Robotics의 카메라 제어를 위한 소프트웨어 인터페이스도 지원합니다.
LARD의 Vacuum Gripper와 같은 특수 그리핑 시스템의 통합도 소프트웨어 인터페이스에서 지원됩니다.

카메라 및 로봇 암의 정확한 캘리브레이션
로봇 시스템이 카메라를 사용하여 객체를 감지한 후 그리퍼나 도구를 활용해 상호작용하려면, 핸드-아이 캘리브레이션이 필수적입니다. 시스템이 카메라 좌표를 '로봇 좌표로 변환하는 방법'을 정확히 인식해야 하기 때문입니다.
간편한 핸드-아이 캘리브레이션:웹 GUI 를 통해 수동으로 수행 하거나 REST API 인터페이스를 통해 프로그래밍 방식으로 진행할 수 있습니다 .

가볍고 컴팩트한 디자인
로봇 암은 추가로 탑재할 수 있는 무게에 제한이 있습니다.
가벼움: 0.68kg의 경량 설계
컴팩트함: 135 mm x 75 mm x 96 mm 크기부터 시작
이러한 제품 특징 덕분에 로봇의 추가 하중이 최소화되며, 이미지 처리 시스템의 통합이 더욱 용이해집니다.
로봇 암을 위한 Stereo visard 카메라의 장점
Stereo visard 카메라는 첨단 카메라 시스템과 함께 로봇이 작업해야 하는 어플리케이션에 최적화된 솔루션입니다. 제공하는 기능은 다음과 같습니다:
자율적 데이터 처리 & 실시간 처리 기능:
온보드 프로세싱 덕분에, 카메라는 외부 컴퓨팅 자원 없이 이미지 데이터를 처리하여 로봇 암과 신속하게 상호작용할 수 있습니다.
정밀한 3D 캡처:
빈 피킹과 같은 어플리케이션에 최적화되어 있으며, 객체를 3D로 감지하고 정확한 위치를 계산합니다.
견고한 설계:
산업용 및 로봇 암과 같은 다이나믹한 어플리케이션에 매우 적합합니다.
간편한 통합
이더넷 연결과 소프트웨어 인터페이스를 통해 카메라는 로봇 시스템에 쉽게 통합될 수 있습니다. REST API 인터페이스를 통한 핸드-아이 캘리브레이션을 지원하여 각 로봇 시스템에 손쉽게 적응할 수 있습니다.
로보틱스용 Basler 어플리케이션 소프트웨어

개별 소프트웨어 모듈은 객체 인식, 픽킹 작업, 내비게이션과 같은 대표적인 로봇 어플리케이션을 위해 설계되었습니다. 해당 어플리케이션에 맞춰 플러그앤플레이 방식으로 활성화할 수 있으며, 직관적인 운영이 가능하여 전체 시스템 비용을 절감할 수 있습니다.
로봇 공학용 어플리케이션 소프트웨어