3D 스마트 센서로 로봇의 역량 강화
3D 스마트 센서로 로봇의 역량 강화
공장 자동화 어플리케이션을 위한 로봇의 사용은 상당한 속도로 증가하고 있습니다. 점점 더 많은 제조업체는 생산 간소화를 통하여 단순 반복적인 작업을 보다 정확하고 효율적으로 수행할 수 있는 로봇시스템을 도입하고 있습니다.
Pick-and-Place의 중요성
로봇이 시각적 가이드 또는 모션 기반 스캐닝과 같은 정교한 작업을 수행할 수 있지만 오늘날의 로봇 자동화 어플리케이션의 다수가 픽 앤 플레이스 (pick-and-place) 방식인 것은 우리의 경험입니다. 하나의 공정에서 다른 공정로 움직이는 컨베이어, 쌓인 상자 또는 팔레트 위에 부품을 체계적으로 또는 무작위로 배치할 수 있습니다.
이러한 시스템에는 일반적으로 진공 또는 공기압력 기반 그립이 장착된 로봇 팔이 포함되어 있어 로봇이 다양한 표면의 부품에 접촉하여 대상을 충돌 없이 효과적으로 운반할 수 있습니다. 일부 전문 응용 프로그램에는 부품을 집어 들고 조작하고 배치하는 "손가락"이 있는 기계식 그립이 필요합니다.
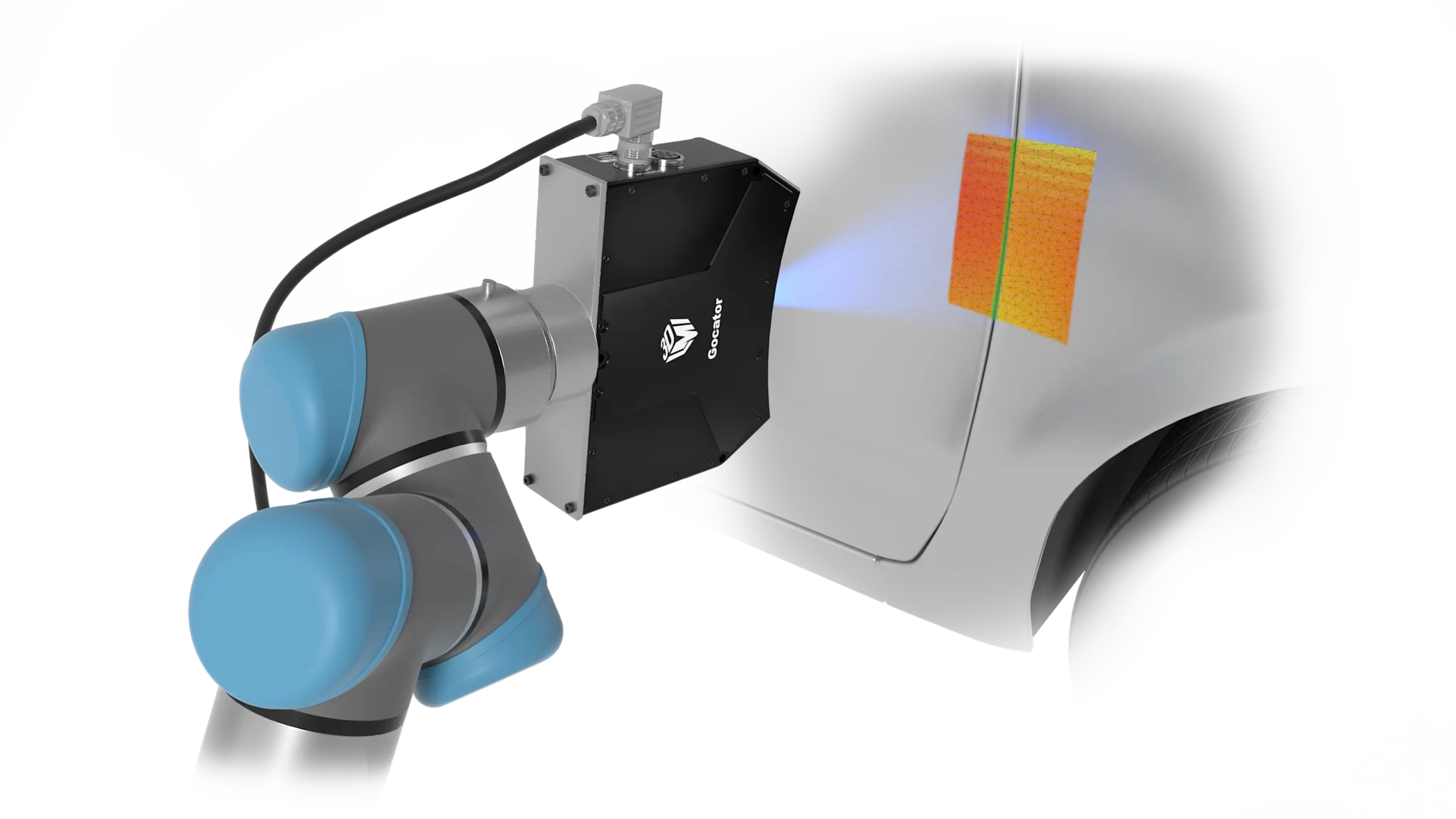
영상의 어플리케이션에서는 Braas UR 로봇과 통합된 Gocator 2340 라인 프로파일러가 파트의 정확한 위치와 3D 방향이 가변적인 경우에도 한 번에 하나씩 제시된 파트를 픽업하여 미리 설정된 순서와 위치에 배치하도록 로봇을 안내합니다.