Bildgeführte Robotik
Smarte Roboter mit der Kraft des Sehens: Mehr Fähigkeiten und Flexibilität für vielfältige Einsatzmöglichkeiten
Roboter führen Aufgaben aus, die für den Menschen nicht oder nur schwer zu bewältigen sind. Computer Vision verleiht Robotern „Sehvermögen“ und eröffnet schier unbegrenzte Einsatzmöglichkeiten. Computer Vision macht Roboter flexibler und trägt dazu bei, Anwendungsgebiete zu erweitern. Wir bieten Ihnen eine passgenaue Vision Lösung zum besten Preis-Leistungs-Verhältnis.

Schnelle Integration durch Kompatibilität
Kompatibel mit KUKA, FANUC, Universal Robots, Schmalz und vielen bekannten Marken in der RobotikKonformität mit ROS und GenICam
Basler 2D- und 3D-Kameras sind ROS 1, ROS 2 und GenICam konform, für eine standardisierte, einfache IntegrationPlug & Play: USB 3.0 & GigE/5GigE
Standard-Schnittstellen mit hohem Datendurchsatz, unterstützt von Industrie-PCs und Embedded SystemenBreites Portfolio
Neben kompatibler Hardware bieten wir das passende Software-Portfolio für Bildaufnahme und Bildverarbeitung
Mit der Kraft des Sehens: Smarte Roboter durch Machine Vision
Moderne Industrieroboter können durch Bildverarbeitungssysteme erheblich mehr leisten: Sie erfassen präzise Details und nutzen diese zur Steuerung ihrer Bewegungen. Durch die Auswertung der Bilddaten in Echtzeit können Bewegungen korrigiert werden. All das erweitert die Einsatzmöglichkeiten von Robotern in Produktion und Logistik.

Flexiblere Prozesse dank Machine Vision
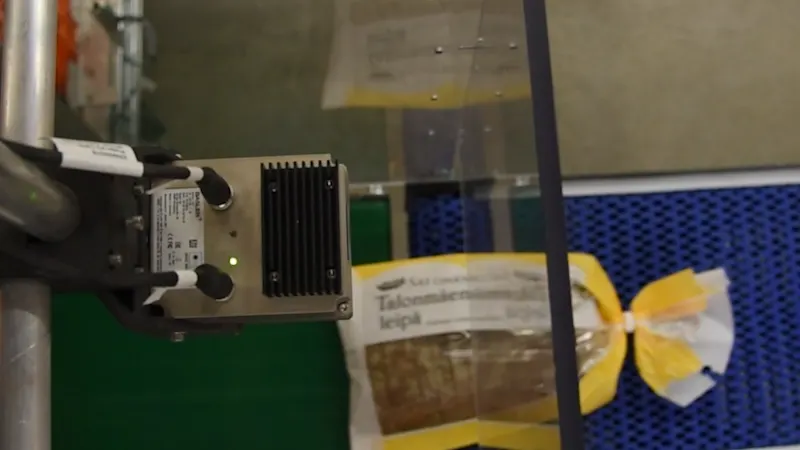
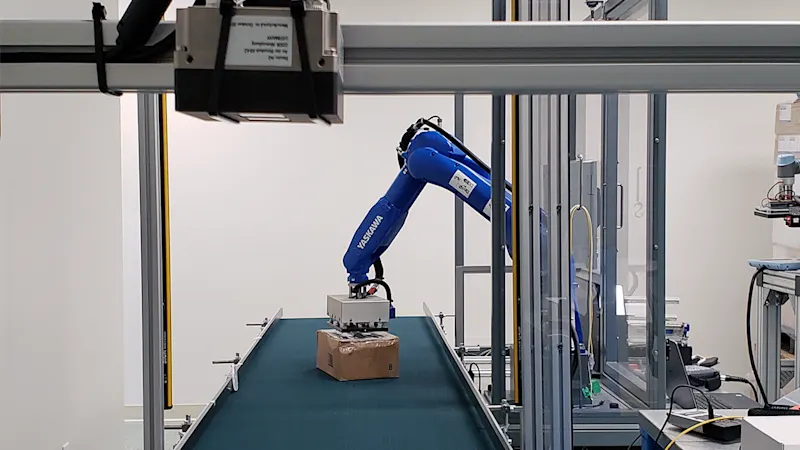
Selbst einfache Aufgaben wie das Greifen von Bauteilen aus einer definierten Lage scheitern oft ohne Bildverarbeitung, wenn Bauteile nicht exakt positioniert sind. Vision Systeme lösen solche Probleme mühelos: Kameras erfassen die Lage der Bauteile, berechnen Abweichungen und geben korrigierte 2D- oder 3D-Koordinaten an die Robotersteuerung weiter.
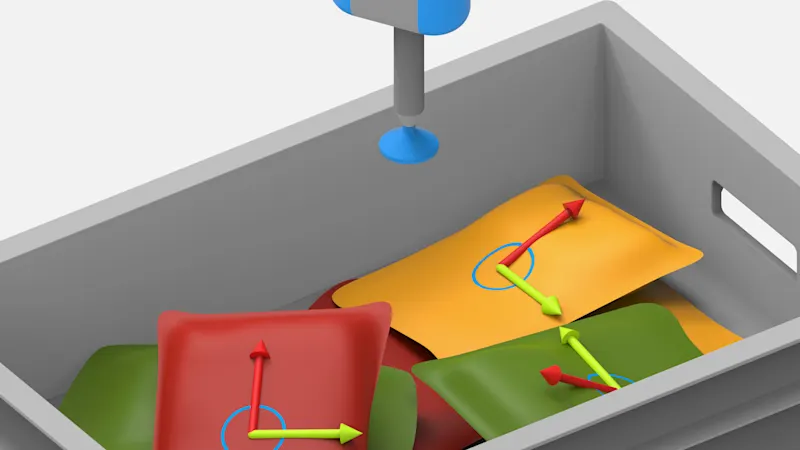
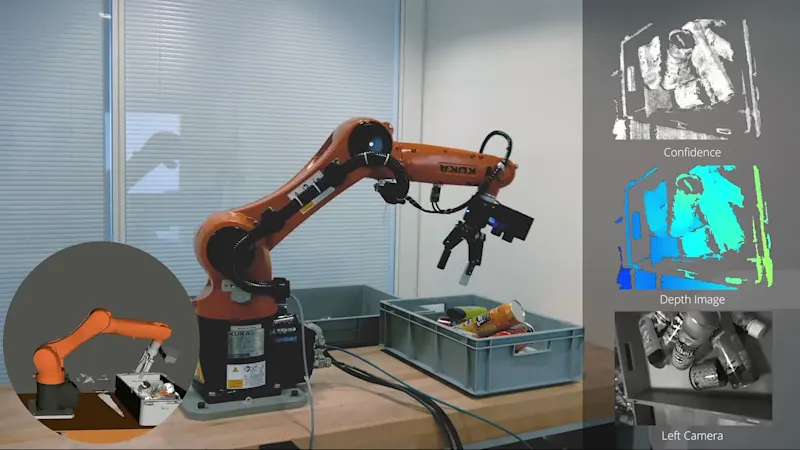
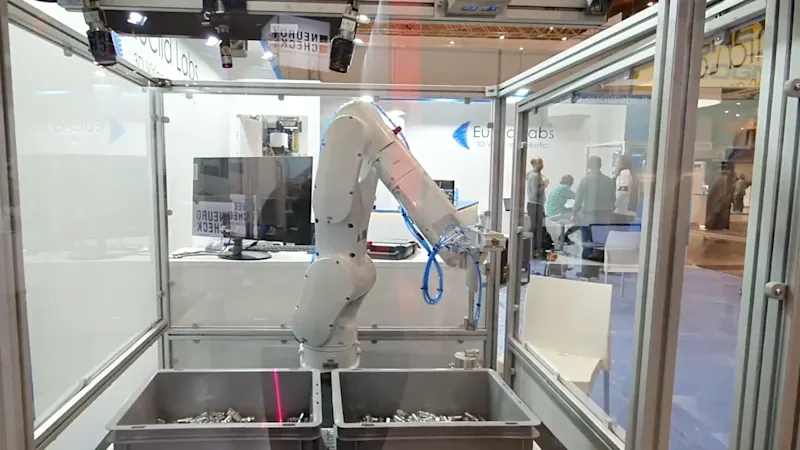
Die Königsdisziplin ist der sogenannte „Griff in die Kiste“, bei dem ungeordnet liegende Teile präzise gegriffen werden müssen. Hierzu identifiziert das Vision System das nächste greifbare Bauteil, bestimmt dessen exakte 3D-Position und übermittelt die Daten an den Roboter. Ohne Bildverarbeitung wäre diese Aufgabe nicht lösbar.
In der Zusammenarbeit mit Menschen, insbesondere bei Cobots, spielen Vision Systeme zudem eine Schlüsselrolle. Sie erhöhen die Sicherheit, indem sie Kollisionen vermeiden, und schützen so die Gesundheit menschlicher Kollegen. Gleichzeitig reduzieren sie Kosten und Ausfallzeiten durch präzisere Bewegungen, die Schäden an Werkstücken und Anlagen verhindern.
Das richtige Vision System für Ihre Robotik-Anwendung
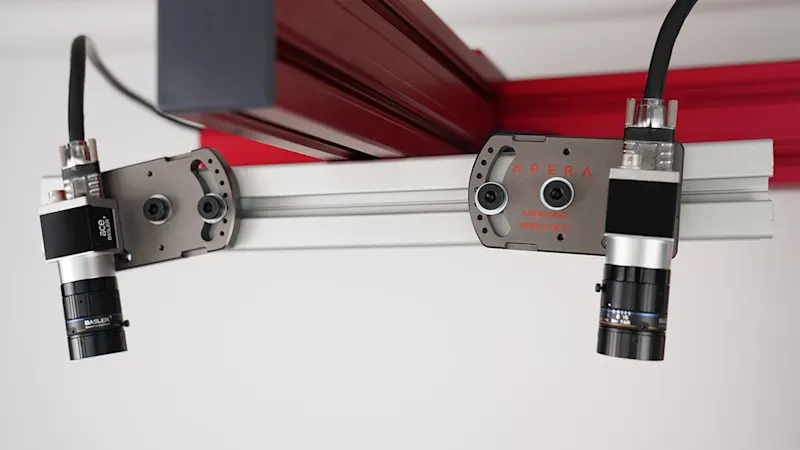
Die Auswahl und das Setup eines Vision Systems sind entscheidend für den Erfolg Ihrer Robotikanwendung. Ein zentraler Faktor ist die Positionierung der Kamera: Sie kann entweder fest installiert („Off-Arm“) oder direkt am Roboterarm („On-Arm“) angebracht werden. Letzteres erfordert leichte, robuste Kameras mit vibrationsfester Verkabelung.
Ein weiteres Kriterium ist die Wahl zwischen einer herkömmlichen Industriekamera und einer Smart Kamera. Während Industriekameras durch externe Verarbeitung höchste Präzision und Geschwindigkeit bieten, punkten Smart Kameras mit integrierter Bildauswertung. Die endgültige Wahl hängt von den Anforderungen Ihrer Anwendung ab, wie Präzision, Geschwindigkeit und Umgebungsbedingungen.
Neben der Kamera spielen Beleuchtung, Optik und Verkabelung eine zentrale Rolle. Angepasste Beleuchtung und torsionsfeste Kabel stellen sicher, dass Ihr System auch unter anspruchsvollen Bedingungen zuverlässig funktioniert.

Aufeinander abgestimmt und aus einer Hand
Bei uns finden Sie Software- und Hardware-Komponenten für Ihr smartes Computer Vision System – alles optimal aufeinander abgestimmt:
2D-Kameras mit Auflösungen von VGA bis 127 MP
Time-of-Flight- und Stereo Kameras für kosteneffiziente und smarte 3D-Bildgebung
Große Auswahl an Beleuchtung einfach integrierbar über Baslers pylon SDK
Passende PC-Karten und Framegrabber zu Ihrer Vision Technologie
Sorgfältig ausgewähltes Zubehör wie Objektive, schleppkettentaugliche Kabel und IP67-Schutzgehäuse

Schnelle Integration durch System-Kompatibilität
Unsere Produkte haben ihre Kompatibilität bei vielen Robotik-Lösungen unter Beweis gestellt: KUKA, FANUC, Universal Robot, Denso und Techman sowie Greifsysteme von SCHMALZ und viele andere Robotik-Marken arbeiten reibungslos mit unseren Vision Systemen.
ROS 1- und 2-Kompatibilität von Basler 2D- und 3D-Kameras
Basler Vision Komponenten integriert in viele Betriebssysteme, z.B. von FANUC
Software-Konnektoren z.B. für KUKA, Universal Robots und Franka Emika
Kontaktieren Sie uns für weitere Details zur Kompatibilität.
Software als Schlüssel für intelligente Robotiksysteme
Neben der Wahl der passenden Vision Hardware ist Software entscheidend, um „sehende" Roboterzellen wirtschaftlich und effizient umzusetzen. Roboter und Greifer arbeiten oft mit proprietären Steuerungen. Ihre nahtlose Integration erfordert durchdachte Konzepte. Ein erheblicher Teil der Projektkosten entsteht durch die Entwicklungszeit. Daher sind leistungsfähige Softwarelösungen und intuitive Programmiertools essenziell, um komplexe Aufgaben schnell und effizient zu meistern.

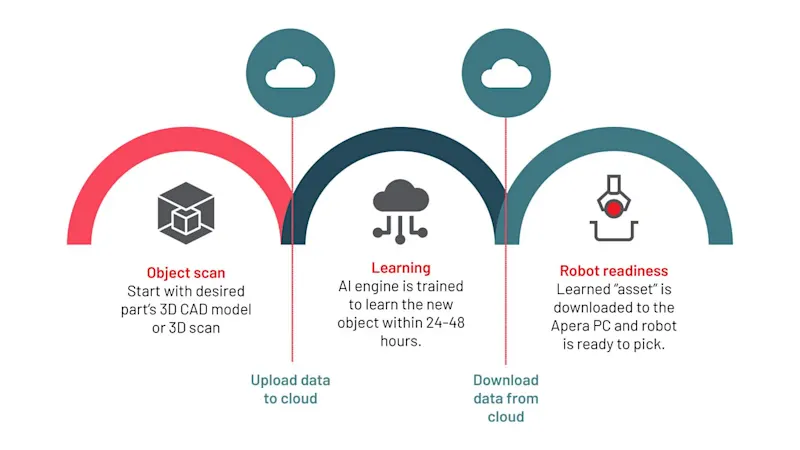
3D Application Software for Robotics
Die individuellen Software-Module sind speziell entwickelt für typische Robotik-Applikationen wie Objekterkennung, Picking-Aufgaben und Navigation. Sie lassen sich intuitiv bedienen und per Plug-and-Play für die jeweilige Anwendung aktivieren. Sie ermöglichen niedrige Gesamtsystemkosten, durch einzeln wählbare Software-Module.
Zur Robotics Application Software
2D-Bildverarbeitung als Ergänzung für Roboter-Anwendungen
Die Basler pylon Software Suite kann viel mehr als nur Konfiguration und Bilderfassung für 2D-Kameras. Sie ermöglicht mit den integrierten pylon vTools hoch performante Bildverarbeitungsfunktionen.
pylon SDK Software als Programmier-Schnittstelle für alle 2D-Kameramodelle, einsteigerfreundlich, für hohe Produktivität und stabile Anwendungen
pylon Viewer für Kameraevaluierung und mit leistungsstarken Werkzeugen
pylon Treiber & GenTL bieten stabile und zertifizierte Treiber für Windows, Linux, MacOS und Android
pylon vTools ermöglicht Bildverarbeitung wie Objektpositionierung, Vermessung oder Codeerkennung
Anwendungsbeispiele in der Robotik
Bildgebungssysteme praktisch umgesetzt, die sich zeit- und kostensparend für verschiedenste Anwendungen nutzen lassen. Überzeugen Sie sich von unseren maßgeschneiderten Lösungen.


Meist eingesetzte Produkte
Für effiziente und zuverlässige Vision Anwendungen in dieser Branche eignen sich die folgenden Basler Produkte:








