Basler ToF 軟體
為了讓您順利進入 3D 成像領域:Basler pylon 軟體和 pylon 補充包納入所有必要的工具,可輕鬆設置及整合 Basler ToF 相機。

pylon 軟體補充包範圍
Basler blaze Viewer
Basler GenTL Producer
程式範例
符合 GenICam、GenTL 及 GenAPI 標準,因此能隨插即用與常用函式庫整合,例如 HALCON、Isaac、MIL、OpenCV、點雲庫 (PCL)、ROS 等
可用於 Windows 及 Linux (x86_64, ARM)

透過 blaze Viewer 看見全貌
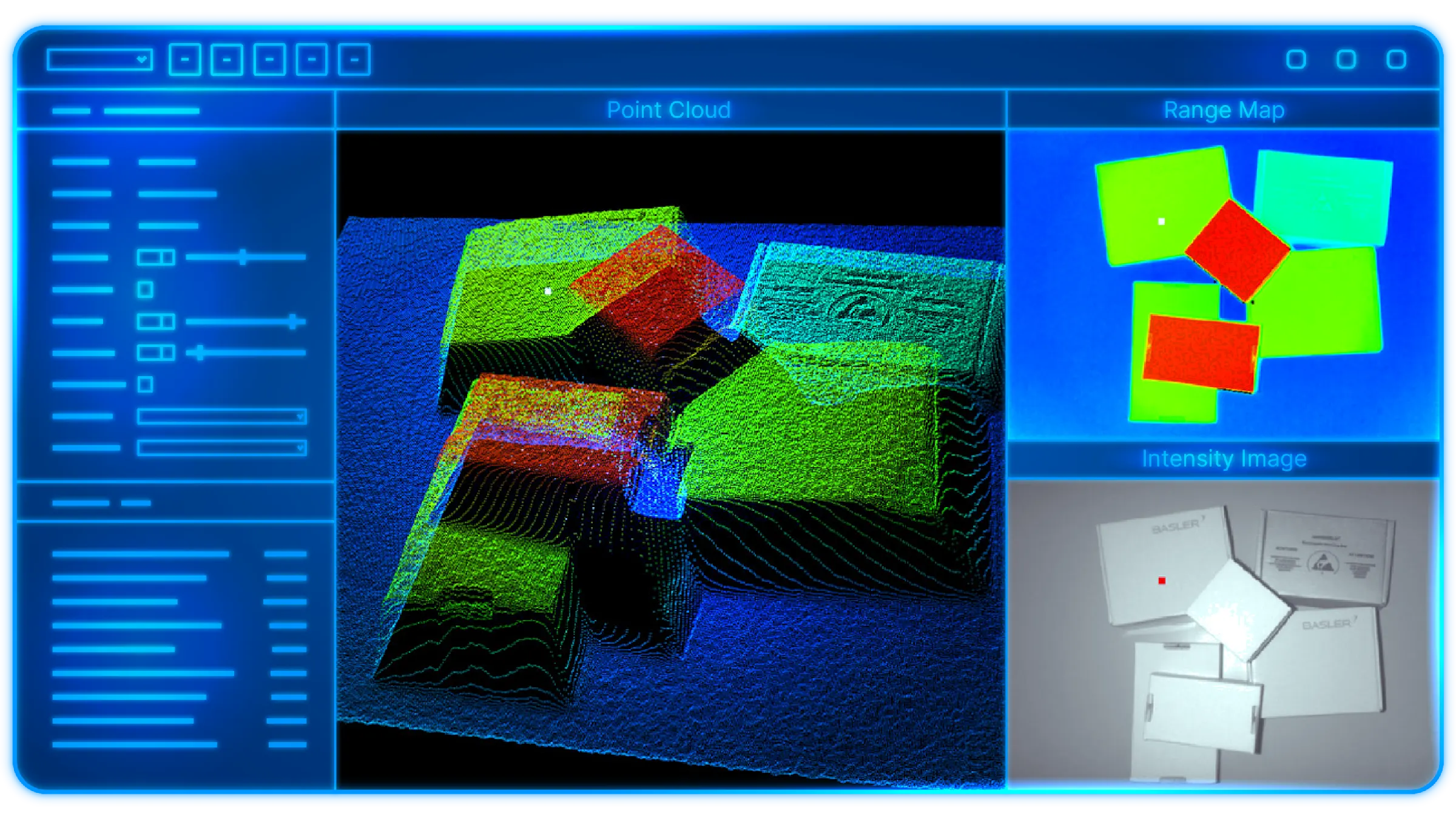
Basler ToF 相機專用 pylon 軟體補充包包含人性化 blaze Viewer 在內。這款功能強大的配置與視覺化工具讓您輕鬆存取所有相機參數。深度資料和強度影像同時在多個視窗中顯示。
透過 GenAPI 功能樹存取所有相機功能
各參數詳細內容
視覺化強度影像、點雲影像、範圍圖、confidence map
程式碼片段直接複製貼上到源碼內
輕鬆儲存影像格式及設定
機器人作業系統 (ROS) 專用 pylon 相機驅動程式
整合 Basler ToF 相機,即可利用視覺元件以創新方式進行機器人程式設計。時差測距相機提供符合經濟效益的即時 3D 成像功能,現在可以透過 pylon 相機驅動程式用於機器人作業系統(ROS 1 和 2)的完整修訂版。

ToF 相機快速入門代碼範例
軟體補充包內含大量的代碼範例,讓您輕鬆熟悉相機功能和API。許多用例清楚說明如何將 3D ToF 相機整合到應用中。
代碼範例以 C++、C# 和 Python 提供