機械臂上的相機
Stereo visard 相機可在動態環境中進行精確、智慧的影像處理
相機讓機器人得以感知周圍環境、辨識物體並執行複雜任務。為了執行這些任務,機械臂上的相機必須能夠補償振動、即時處理影像資料,並提供順暢整合。要達到這些要求,需要專為克服這些挑戰而設計的特殊相機。
機器手臂上相機的典型應用
Stereo visard 相機具備抗振性能和精巧設計,非常適合在機器人手臂和動態環境中進行工業應用。

工業相機可安裝為臂上元件,讓機器人單元精巧靈活。使用機械臂,相機的拍攝位置可以自由改變,以便自不同方向和近距離精確觀察物件。

我們用於機器人應用的工業級 3D 雙目視覺相機
安裝在機器人手臂上,可獲最佳效果的相機
儘管在機械臂上安裝相機有很多好處,但也需要考慮各種挑戰。Stereo visard 相機專為滿足這些需求而開發。

抗振動、衝擊、潑濺
機械臂產生的振動會導致影像模糊。我們的 Stereo visard 具備足夠的機械穩定性來避免這些問題,同時將生產環境中的各種惡劣條件列入設計考量:
抗振動 高達 5 g 、抗衝擊 最高 50 g
M12 連接器 確保線材連接牢固
防潑濺,具 IP54 等級防水能力
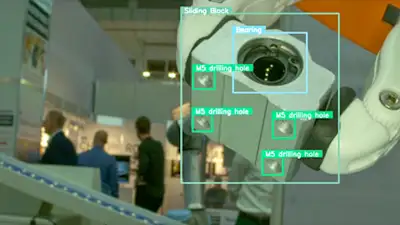
即時功能,獲取可靠結果
對於許多應用,尤其是機械臂快速移動時,能夠即時進行影像處理非常重要。
Stereo visard 相機透過 板載處理提供即時資料處理功能:直接在相機上處理影像資料,系統可以快速反應,無需外部電腦。

以 Collision Check 避免碰撞
機械臂通常不得不擠在有限的空間內運作,還得緊密連續地執行快速動作,很容易發生碰撞,在最壞的情況下,相機校正狀態很可能遭到破壞。有了 Collision Check 功能,即使在狹小空間內 Stereo visard 也能可靠運作。
軟體模組 3D ItemPick、3D BoxPick 或 3D SilhouetteMatch 的 Collision Check功能,可防止夾具與其他物體發生碰撞。

輕鬆整合到目標應用中
將相機系統整合到機器人控制器中是不可或缺的,也是影響機器人應用效率和可靠性的關鍵因素。
Basler Stereo visard 相機具備 乙太網路介面,帶來穩定快速的資料傳輸能力,並可輕鬆整合到現有系統中。
適用於各廠牌機器人的軟體介面,例如 ABB、FANUC、Franka Robotics 和 Fruitcore Robotics。我們提供KUKA、Techman Robot、 Universal Robots 和 Yaskawa Motoman Robotics 的相機控制軟體介面。
特殊夾取系統整合,例如LARD真空夾具,一併包含在軟體介面中。

相機和機器人手臂的精確校正
當機器人系統使用相機偵測物件,並使用夾具或工具進行互動時,需進行單一手眼校正。畢竟系統必須知道如何將相機的座標轉換為機器人的座標。
使用簡便:該手眼校正功能可透過 web GUI 手動完成,也可透過 REST API 介面以程式方式進行。

重量輕、結構精巧
機械臂可容許額外重量的能力相當有限。
輕巧:重量輕,僅 0.68 kg 起
精巧: 135 mm x 75 mm x 96 mm 起
整合多樣產品功能,將機器人的額外負載最小化,成像更容易整合。
用於機械臂 Stereo visard 相機的優勢
機器人需要使用最先進的相機系統,而 Stereo visard 相機是應用的完美解決方案,提供:
自主資料處理即時功能:
本相機採板載處理設計,可在沒有外部計算資源的情況下處理影像資料,以便與機器人手臂快速互動。
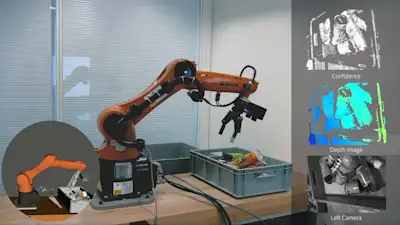
精確的 3D 拍攝:
非常適合物件夾取等應用,可偵測 3D 物件並計算其準確位置。
設計堅固耐用:
非常適合工業用途和動態應用,例如機器手臂。
整合簡便:
本相機可以透過乙太網路連線和軟體介面,輕鬆與機器人系統整合。透過 REST API 介面確保手眼校正準確,並可和對應的各種機器人系統輕鬆適配。
Basler 機器人應用軟體

為各種典型機器人應用設計的獨立軟體模組,適用於物件辨識、取拾任務與導覧。這些模組可按各種應用所需,透過隨插即用方式啟用,並可直覺操作,降低整體系統成本。
機器人應用軟體